Структурные группы механизма

Рычажный механизм состоит из механизма 1-го класса и двухповодковых групп (диад).
Структурный анализ начинают с дальней диады.
Диада 4 – 5 (рис. 2) – шатун AC с ползуном C – представляет собой двухповодковую группу второго вида, т. е. диаду с двумя вращательными ![]() и
и ![]() , и одной
, и одной ![]() поступательной (конечной) парой.
поступательной (конечной) парой.
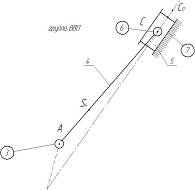
Рис. 2 Диада 4 – 5
Число подвижных звеньев ![]() .
.
Число кинематических пар с учетом незадействованной ![]() , но учитываемой при определении степени подвижности диады
, но учитываемой при определении степени подвижности диады ![]() ;
; ![]() .
.
Степень подвижности диады ![]()
Диада 2 – 3 (рис. 3) – шатун AB с ползуном B представляет собой двухповодковую группу второго вида, т. е. диаду с двумя вращательными ![]() и
и ![]() , и одной
, и одной ![]() поступательной (конечной) парой.
поступательной (конечной) парой.
Число подвижных звеньев ![]() .
.
Число кинематических пар с учетом незадействованной ![]() , но учитываемой при определении степени подвижности диады
, но учитываемой при определении степени подвижности диады ![]() ;
; ![]() .
.
Степень подвижности диады ![]()
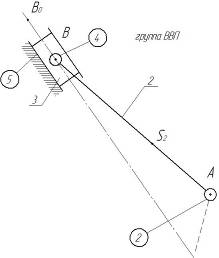
Рис. 3 Диада 2 – 3
Механизм 1-го класса (рис. 4) – ведущее звено 1 (кривошип OA), соединенное шарниром O с неподвижной стойкой 6.
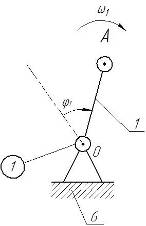
Рис. 4 Механизм 1-го класса
Число подвижных звеньев ![]() .
.
Кинематические пары в точке A учтены в диадах 4 – 5 и 2 – 3.
Число кинематических пар ![]() ;
; ![]() .
.
Степень подвижности механизма 1-го класса ![]() .
.
Определение параметров конца расширения
Давление конца расширения Давление конца расширения в двигателе с воспламенением от сжатия определяется из следующего выражения: (29) где - степень последующего расширения; - средний показатель политропы расширения. (30) (31) Температура конца расширения В конце расширения температура высчитывается ...
Дифференциал
Дифференциал предназначен для распределения крутящего момента между ведущими Полуосями и обеспечения вращения с различными угловыми скоростями ведущих колес автомобиля или трактора при движении их на поворотах и по неровной дороге. Дифференциалы по конструкции подразделяют на шесте^нчатые с коничес ...
Расчёт механизма подъёма груза
Исходные данные: грузоподъемность 50кН скорость подъёма груза 10 м/мин режим работы – средний кратность полиспаста 3 высота подъёма 6 м Выбор каната Максимальное статическое усилие Smax в канате определить по формуле: ; где Q – номинальная грузоподъёмность, кН; a – кратность полиспаста; ηпол – ...