Обмен данными посредством
шины CANСтраница 2

Процесс начинается с измерения частоты вращения посредством датчика, соединенного с блоком управления двигателем. Измеряемое значение периодически вводится во входное запоминающее устройство микроконтроллера. Так как данные о моментальном значении частоты вращения должны поступать на другие блоки управления, например, на блок управления в комбинации приборов, для их передачи следует использовать шину CAN.
Поэтому информация о частоте вращения копируется в выходном запоминающем устройстве блока управления двигателем. Выдачей задания на передачу данных модулю системы CAN блок управления двигателем завершает выполнение данной функции.
Числовое значение частоты вращения преобразуется в специальное послание для передачи через шину CAN, составленное согласно протоколу.
Модуль системы CAN, связанный с шиной через провод RX, проверяет, находится ли шина в активном состоянии (когда через нее передаются другие сообщения). При необходимости модуль выжидает, пока шина не освободится. При этом она должна в течение некоторого времени иметь логический уровень "1". После освобождения шины производится передача послания с данными о параметрах двигателя.
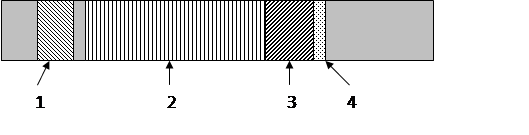
Рисунок 1.7 – Послание в шине CAN: 1 – идентификационный код послания (11 бит); 2 – содержание послания ( до 64 бит); 3 – контрольная сумма (16 бит CRC-Check); 4 – подтверждение приема послания ( 2 бит Ack)
Все получатели принимают послание с данными о параметрах двигателя и проверяют его на наличие ошибок на уровне контроля. При этом распознаются локальные нарушения в процессе передачи данных, которые могут возникнуть, например, только в одном блоке управления. Благодаря этому обеспечивается высокая плотность потока передаваемой информации.
Все подключенные к шине станции получают послание от блока управления двигателем (по принципу широковещательной трансляции). После этого они могут определить на контрольном уровне по сумме CRC (Cycling Redundancy Check), нет ли в послании ошибок передачи. При передаче каждого послания формируется и передается контрольная сумма размером 16 бит, которая несет информацию о всем объеме информации.
Абоненты пересчитывают контрольную сумму по тем же правилам, по которым она была образована. В заключение полученная контрольная сумма сравнивается с рассчитанной суммой.
Если ошибки не обнаружено, все станции направляют передатчику уведомление в получении послания, которое называется Acknowledge и следует за контрольной суммой.
Затем корректно принятое послание переводится на так называемый уровень признания данного модуля системы CAN. На этом уровне определяется возможность использования послания для конкретного блока управления. Если получен отрицательный ответ, послание отбрасывается. При положительном ответе послание направляется в соответствующий входной почтовый ящик. Комбинация приборов вызывает это послание и копирует соответствующее значение во входном запоминающем устройстве.
На этом передача и прием посланий посредством шины CAN заканчивается.
Анализ ДТП за прошлый год в Омском регионе
В условиях увеличивающегося парка автомобилей проблема безопасности дорожного движения является одной из важнейших социально-экономических задач. Важным фактором, влияющим на безопасность дорожного движения, является техническое состояние ТС, под которым понимается как совершенство их конструкции, ...
Вагоносборочный участок. Определение параметров поточного производства
Вагоносборочный участок служит для производства разборочных, ремонтно-сборочных и малярных работ на вагоне. На площади вагоносборочного участка в небольших депо выполняют также ремонт тележек. Рациональным является организация тележечного отделения вне вагоносборочного участка и включение его в сос ...
Совершенствование организационных структур
Особенность автомобильного транспорта (равно как и других его видов) состоит в том, что производственный процесс в этой отрасли складывается из работы подвижного состава на линии и технического обслуживания транспортных средств. Производственный процесс выходит за рамки непосредственно предприятия. ...