Методы измерения дальности

В основе измерения дальности лежат принципы локации. Выделяют два вида локации:
- пассивная локация основана на приёме собственного излучения объекта;
- при активной радиолокации радар излучает свой собственный зондирующий импульс и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная локация, в свою очередь, делится на:
- локацию непрерывного действия;
- локацию импульсного действия.
Достоинством системы такого типа является дешевизна и простота использования, однако в таких системах сильно затруднено измерение расстояния до объекта.
В основе измерения дальности методом импульсной локации лежит измерение запаздывания tз сигналов. В зависимости от параметров сигнала, в которых содержится информация о tз, различают амплитудный, частотный и фазовый метод измерения расстояния.[13]
Амплитудный метод характеризуется использованием импульсной модуляции излучаемых колебаний. В этом случае на передачу и прием сигналов работает один приемопередатчик. Ниже приведена структурная схема импульсной локационной системы. Переключатель (П) подсоединяет УЗ трансмиттер (УЗТ) к генератору пачки УЗ импульсов (ГИ) на время tи генерации УЗ импульса и к приемнику (ПР) на все остальное время, определяемое периодом следования импульсов. Зондирующий сигнал представляет последовательность импульсов с периодом Tп , который выбирается из условия однозначности измерения дальности: Rmax=Vзв∙Tп/2, где Vзв скорость звука.
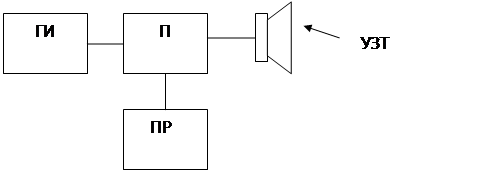
Рисунок 2.2 - Структурная схема импульсной ЛС.
Достоинства импульсных схем локации заключаются в возможности использования одного обратимого УЗ излучателя для излучения и приема сигналов, удобстве одновременного измерения дальностей многих объектов. Недостатки состоят в ограничении импульсной мощности передатчика и в связанной с этим ограничении Rmax.[13]
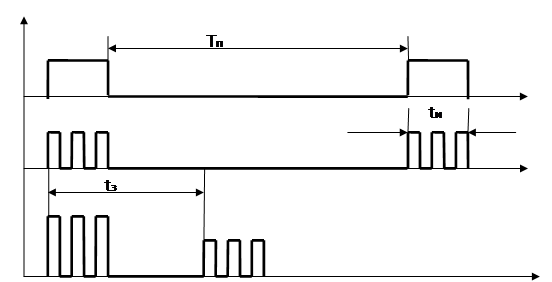
Рисунок 2.3 – Временная диаграмма импульсной ЛС
Особенности
конструкции спроектированного двигателя
Спроектированный двигатель предназначен для работы на гребной винт. В связи с достижением в мировом судовом дизелестроении есть варианты оптимизации конструкции рассматриваемого дизеля. По мнению автора курсового проекта, эти варианты заключаются в следующем: Увеличение длинноходности. Величины s/d ...
Характеристика и устройство теплового двигателя НБ-418Кб
В двигателе электрическая энергия преобразуется в механическую. Для целей тяги очень важно знать электромеханические характеристики двигателя - зависимость его механических параметров (частоты вращения, силы тяги F и коэффициента полезного действия η) от электрических (тока I двигателя при но ...
Технология
восстановления деталей механизма подъёма мостового крана общего назначения
Во время ремонта сборочные единицы демонтируют и разбирают на составные части. Детали моют и отправляют на дефектацию. Шестерни, колёса, валы, подшипники, износ которых превысил допустимое значение, заменяются новыми или восстанавливаются. Восстановленные, новые, бездефектные детали направляются на ...