Определение ускорений методом построения планов ускоренийСтраница 1

Механизм 1-го класса – кривошип OA связан со стойкой вращательной парой и равномерно вращается вокруг центра O.
Угловое ускорение кривошипа, так как ![]() , то
, то ![]() .
.
Ускорение точки A определяем, рассмотрев вращение кривошипа ![]()
Модули
![]()
![]()
Направлен вектор ![]() в сторону центра O.
в сторону центра O.
Шатуны AB и AC совершают плоскопараллельное движение. У каждого шатуна известна скорость точки A. Принимая точку A за полюс, запишем векторные уравнения для определения ускорения точек B и C.
![]()
![]()
Модули нормальных ускорений точек B и C шатунов во вращательном движении вокруг точки A определяем по формулам:
![]()
![]()
Направлены эти ускорения вдоль шатунов соответственно от точек B и C к полюсу A.
Модули касательных ускорений точек B и C шатунов во вращательном движении вокруг точки A пока неизвестны.
Направлены ![]() и
и ![]() - соответственно перпендикулярно AB и AC.
- соответственно перпендикулярно AB и AC.
Направлены ![]() и
и ![]() - вдоль цилиндров, параллельно прямым OB и OC.
- вдоль цилиндров, параллельно прямым OB и OC.
Выбираем ![]() - масштаб построения плана ускорений.
- масштаб построения плана ускорений.
Пусть вектору ускорения ![]() соответствует отрезок
соответствует отрезок ![]() , где
, где ![]() - полюс плана ускорений.
- полюс плана ускорений.
Масштаб ускорений
![]()
Находим отрезки на плане ускорений, соответствующие ускорениям ![]() и
и ![]() :
:
![]()
![]()
В выбранном масштабе строим план ускорений по векторным уравнениям, приведенным выше.
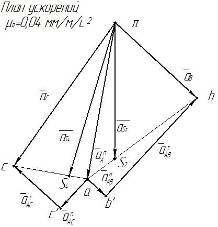
Рис. 7 План ускорений
Замеряем отрезки на плане ускорений и вычисляем модули неизвестных ускорений.
![]()
![]()
![]()
![]()
Определим ускорения центров масс шатунов.
![]()
![]()
Определяем модули ускорений центров масс шатунов:
![]()
![]()
Определим угловые ускорения шатунов.
Модули определим по формулам:
![]() ;
; ![]()
Расчетно-силовая схема крыла
Рис.4.1. Расчетно-силовая схема крыла На основании того, что размах крыла гораздо больше длины хорды, и тем более строительной высоты, можно сделать допущение о том, что крыло представляет собой балку. Следовательно, расчетно-силовая схема крыла – это балка, опирающаяся на две опоры, которыми являю ...
Основные
допуски в сопряжениях деталей турбокомпрессора
Ремонт Трещины на корпусе компрессора, впускном и выпускном патрубках в количестве не более трех и длиной не более 40 мм заваривают, тщательно зачищают, особенно внутренние поверхности. Герметичность сварочных швов проверяют, наливая керосин. Течи и отпотевание не допускаются. Трещины на корпусе ту ...
Охрана труда
Условия и безопасность труда зависят как от совершенства применяемых машин, технологий и организации производства, так и от окружающей рабочих санитарно - гигиенической обстановки, т. е. температуры, относительной влажности, скорости движения воздуха и освещенности в производственных помещениях. На ...