Ультразвуковой парковочный ассистент

Ультразвуковой парковочный ассистент помогает водителю управлять автомобилем при постановке его на стоянку. Эта система базируется на ультразвуковой технике. Датчики этой системы встроены скрытно в передний и задний бамперы автомобиля.
Принцип работы ультразвукового парковочного ассистента основан на ультразвуке. Именно этим обусловлена дистанция, на которой препятствия определяются с наибольшей точностью. Диапазон расстояния составляет 0,2-2,5 м.[4]
Датчик сначала излучает ультразвуковые волны, затем переключается на прием, чтобы уловить их отражение от препятствия (такой алгоритм работы можно назвать «последовательным»и он используется у большинства устройств). У лучших образцов этот промежуток времени – «время отклика» – не превышает 0,08 секунды. Разработаны парковочные радары с «последовательно-параллельным» алгоритмом: в то время как один датчик посылает сигнал, все остальные работают на прием. Вследствие этого вероятность обнаружения препятствия резко увеличивается. По времени между излучением волн и фиксированием их отражения электронный блок рассчитывает расстояние до препятствия.
Существуют и такие парктроники, в которых роль чувствительного датчика играет плоская ленточная антенна, приклеиваемая на внутреннюю поверхность пластикового бампера. В качестве излучающего элемента, в большинстве случаев, используется пьезоэлектрическая динамическая головка, работающая в ультразвуковом диапазоне частот (преимущественно 40 кГц).
В качестве примера рассмотрим систему ультразвукового парковочного ассистента автомобиля Volkswagen Phaeton.
В системе реализованы следующие новшества:
- спереди и сзади автомобиля установлено по 6 датчиков;
- имеется возможность восприятия препятствий, находящихся сбоку;
- указатели препятствий установлены как спереди, так и сзади;
- предусмотрена световая и звуковая сигнализация.
Акустический сигнал проходит через шину CAN системы “Комфорт” и принимается блоком управления цифровой системой звуковоспроизведения. После обработки в этом блоке он воспроизводится динамиками.
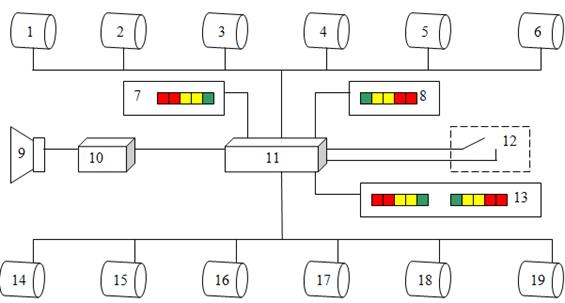
Рисунок 1.6 – Система ультразвукового парковочного ассистента автомобиля Volkswagen Phaeton: 1-6 – датчики-излучатели в переднем бампере; 7 –передний левый модуль указателя; 8 – передний правый модуль указателя; 9 – динамик оповещения водителя; 10 – блок управления цифровой системой звуковоспроизведения; 11 – блок управления парктроник; 12 – выключатель системы; 13 – задний модуль указателя; 14-19 – датчики-излучатели в заднем бампере
Система работает по принципу эхолота. Датчик-излучатель генерирует ультразвуковой (порядка 40 кГц) импульс и затем воспринимает отражённый окружающими объектами сигнал. Электронный блок измеряет время, прошедшее между излучением и приёмом отражённого сигнала, и, принимая скорость звука в воздухе за константу, вычисляет расстояние до объекта. Таким образом, поочерёдно опрашиваются несколько датчиков и, на основании полученных сведений, выводится информация на устройство индикации и, при необходимости, подаются предупреждающие сигналы с использованием устройства звукового оповещения.
Система находится в состоянии готовности, если:
- включено зажигание;
- скорость автомобиля ниже 15 км/ч;
- включен задний ход или включена нейтраль (действуют передние и задние датчики);
- рычаг селектора коробки передач находится в позиции “D” или “S” (действуют только передние датчики);
- при наличии прицепа задние датчики отключаются.
Система бездействует, если:
- скорость автомобиля превышает 15 км/ч;
- затянут ручной тормоз (выключение системы производится через 2 секунды);
- рычаг селектора коробки передач находится в позиции “P”.[4]
Хотя система призвана помогать автолюбителю, полностью полагаться лишь на неё нельзя. Система может не среагировать на предметы (высокие камни, столбы, пни), попавшие в мёртвую зону датчиков. Система не реагирует на мягкие предметы, поглощающие ультразвук (например, вата), и на объекты отражающие звук в сторону от датчиков, как гладкие круглые объекты и ровный склон. Также система, может ложно предупреждать о приближении к препятствию в дождь или снегопад. И никаким образом она не сможет обнаружить провалы в асфальте, открытые колодцы, разбросанные мелкие острые предметы и прочее, что представляет опасность для автомобиля, но не может быть обнаружено датчиками[5].
Подсчет досыпок и срезок
Досыпки и срезки определяются на всех пикетах и плюсах. На участках, где линия ПГР совпадает с линией РГР или располагается выше ее (ПГР<РГР), а такие на тех участках, где имеется неполнота балласта, т.е. линия ПГР располагается ниже линии РГР в пределах до 5 см (РГР–ПГР£ 0.05 м), определя ...
Силовая схема преобразователя и временные диаграммы
Cиловую схему преобразователя изображаю на рис.8. Временные диаграммы строю на рис.9. Диаграммы строятся для режима U = Umах, Iн = Imах, tcy = T / 2. T = 1,9.10-3 c; tcy = 1,95.10-3 c; tk = 377,784.10-6 c ≈ 0,378.10-3 c; tn = 240,442.10-6 c ≈ 0,24.10-3 c; T – (tk + tcy) = 0,572.10-3 c. ...
Определение
коэффициента минимального лобового сопротивления фюзеляжа и мотогондол
Для фюзеляжа с заострённой носовой и кормовой частью при докритических скоростях основной составляющей сопротивления является сопротивление трения. Коэффициент сопротивления асимметричного фюзеляжа (мотогондолы) или эквивалентного тела вращения определяем по аналогии с сопротивлением трения плоской ...