Основные соотношения при частотном управлении

Частотное регулирование по сравнению с другими способами имеет ряд важных преимуществ: регулирование происходит без потерь скольжения, возможно плавное изменение скорости и формирование необходимых механических характеристик и, что особенно существенно, обеспечивается возможность использования в регулируемых ЭП короткозамкнутых машин. При анализе свойств АД в системе частотного управления применяют Т – образную схему замещения, приведенную на Рис.2.10. При этом:
параметр частоты
![]()
параметр абсолютного скольжения:
![]()
параметр напряжения:

здесь:
f1, f2, f3 – частоты соответственно питающего напряжения, номинального и тока статора;
![]() - отношение абсолютного скольжения к синхронной скорости при частоте f1н, Uф, Uфн – действующие фазные значения напряжения питания текущее и номинальное.
- отношение абсолютного скольжения к синхронной скорости при частоте f1н, Uф, Uфн – действующие фазные значения напряжения питания текущее и номинальное.
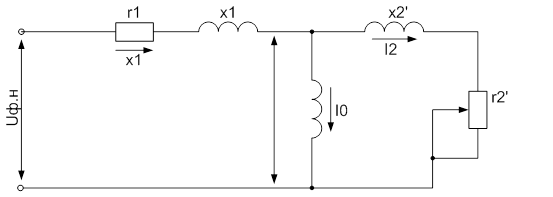
Рис.2.10. Т – образная схема замещения
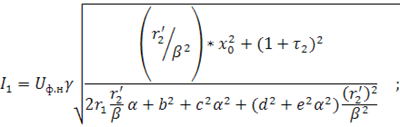
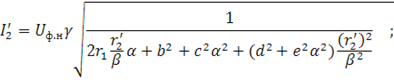
Основные зависимости, характеризующие работу двигателя, определяются из схемы замещения и имеют следующий вид:

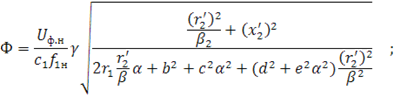
Выражение момента через поток:
В приведенных выражениях
![]()

Частота вращения
![]()
Таким образом, момент двигателя является функцией трех параметров ![]() . В общем случае напряжение регулируется в функции частоты и нагрузки, т.е
. В общем случае напряжение регулируется в функции частоты и нагрузки, т.е ![]() .
.
Модернизация тормозного механизма
В подъемно-транспортных машинах находит применение большое количество разнообразных конструкций колодочных тормозов, различающихся в основном по схемам рычажных систем. Обычно они состоят из рычагов и двух колодок, расположенных диаметрально относительно тормозного шкива. Торможение механизма колод ...
Назначение типов поперечных профилей земляного полотна и определение
междупутий
Типы поперечных профилей земляного полотна второго пути назначаются в зависимости от величины досыпок и срезок, высоты насыпей и глубины выемок существующего полотна и вида водопропускных сооружений с учетом следующих рекомендаций: Тип I (ось существующего пути не смещается) – применяется при малых ...
Характеристика ускорений
Характеристика ускорений - это совокупность кривых, характеризующих ускорения автомобиля (j, м/с2) при различных скоростях движения на разных передачах. Значения ускорений определяют исходя из ранее построенной динамической характеристики. При этом величины ускорений рассчитывают по формуле: , (3.4 ...