Расчет параметров схемы замещения асинхронного двигателяСтраница 1

при 2р = 12.
В асинхронной машине при вращающемся роторе происходит преобразование электрической энергии в механическую, если она работает двигателем, и обратное преобразование, если она работает генератором. Кроме того, при вращающемся роторе частота тока в его обмотке отличается от частоты тока в его обмотке статора. Этими особенностями асинхронная машина при вращающемся роторе отличается от трансформатора, в котором происходит преобразование электрической энергии в электрическую.
В то же время асинхронная машина при неподвижном роторе с точки зрения преобразования энергии полностью соответствует трансформатору.
Чтобы иметь возможность рассматривать ротор совместно со статором (при отсутствии между ними электрической связи), параметры роторной цепи заменяются их приведенными значениями:
![]() ,
, ![]() ,
, ![]() , где
, где
![]() - коэффициент трансформации двигателя.
- коэффициент трансформации двигателя.
Каждому режиму работы АД соответствует определенная область скольжений, а именно:
генераторному режиму - ![]() ;
;
двигательному режиму - ![]() ;
;
режиму противовключения - ![]() .
.
Кроме того следует выделить два промежуточных режима:
короткого замыкания - ![]() ;
;
идеального холостого хода – ![]() .
.
В асинхронных двигателях скорость однозначно связана со скольжением:
![]() ,
,
поэтому механические характеристики двигателей часто представляют в виде зависимости между моментом и скольжением:
![]()
Чтобы получить эту зависимость воспользуемся Т – образной схемой замещения фазы АД построенной на основе вышеизложенных положений (Рис.2.1).
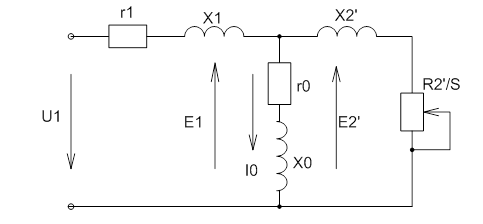
Рис.2.1. Т – образная схема замещения фазы АД
В каталогах на двигатели параметры схем замещения не указываются, а приводимые данные относятся к номинальному режиму работы. И хотя каталожных данных в ряде случаев достаточно для расчета механических характеристик, точность этих расчетов не всегда удовлетворительна. Расчет же таких характеристик двигателя как потери, пусковые и максимальные моменты и соответствующие им токи и др., вообще не может быть выполнен без знания параметров схемы замещения. Ниже приводятся расчеты позволяющие получить параметры схем замещения асинхронных двигателей, а также ряд других параметров по приводимым в каталогах данным: линейному напряжению Uл, и линейному току Iл статора, номинальным значениям мощности Рн, частоты вращения nн, коэффициента мощности cos![]() , КПД ηн, числу пар полюсов р, кратностям максимального kм и пускового kп моментов, кратности пускового тока ki.
, КПД ηн, числу пар полюсов р, кратностям максимального kм и пускового kп моментов, кратности пускового тока ki.
Итак:
номинальное скольжение двигателя:
![]()
где n1 – синхронная частота вращения поля статора;
n2 – частота вращения ротора.
Синхронная угловая скорость поля статора:

Комплексный метод оценки ТУП
Расчет показателя ТУП при этом методе состоит из нескольких действий (шагов), выполняемых в следующей последовательности: ¨ выбор базы для сравнения; ¨ выбор номенклатуры (перечня) показателей качества продукции (ПКП), определяющих комплексный показатель ТУП; ¨ определение абсолютных зн ...
Внешние силы, действующие на механизм
Масса поршней и шатунов определяются по рекомендациям, применяемым в автотракторной промышленности, через площадь поршня . Масса поршней Масса шатунов Площадь поршня определяется по формуле В исходных данных диаметр поршня Находим площадь Примем и Получаем Масса поршней Масса шатунов ...
Операционные
усилители IL558N
Микросхема IL558N содержит два операционных усилителя применимых в различных целях. Высокий уровень выходного напряжения делает эти усилители подходящими для использования в качестве повторителей напряжения. Рисунок 3.21 – Структурная схема IL4558N Напряжение питания схемы не более 16 В. Таблица 7 ...